
{kind=link}
{kind=link}
OpenSWAP
OpenSWAP è un veicolo di superficie completamente autonomo e a controllo remoto, realizzato per applicazioni personalizzate, rilievi geofisici, ispezioni video e molto altro. È leggero, economico, completamente personalizzabile e compatibile con i più comuni GPS e sensori.
OpenSWAP è dotato di piattaforme open source (Arduino, Raspberry Pi) con sistema di navigazione autonomo a doppio GPS e sensori inerziali integrati.
È un piccolo catamarano in plastica (PELLD) con 4 motori brushless, modulare e semplice da mettere in acqua. La versatilità del telaio in alluminio permette di interfacciarlo in maniera semplice con qualsiasi strumento (come side scan sonar, sonde multiparametriche, sub-bottom profiler, ecoscandagli multifascio), con sensori commerciali e non-commerciali, dando quindi la possibilità di ampliare le attrezzature di bordo (sostiene un carico di più di 40 kg).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
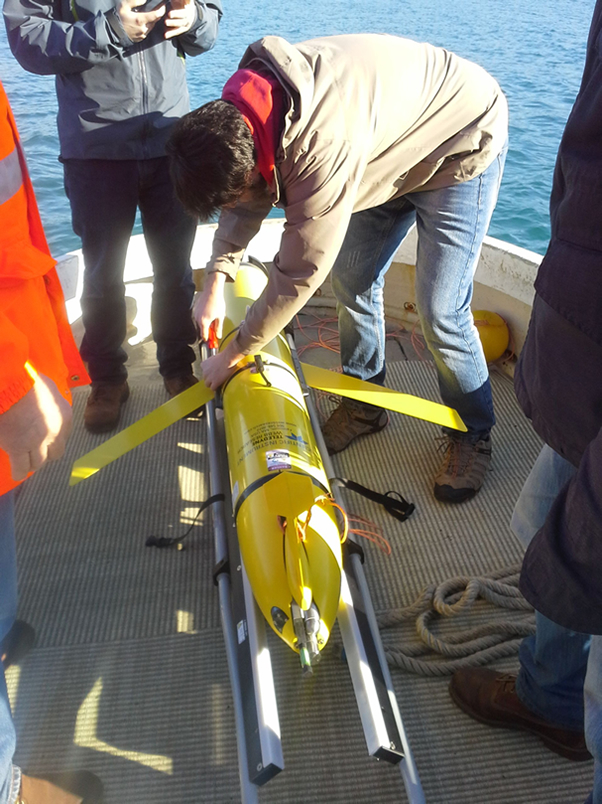
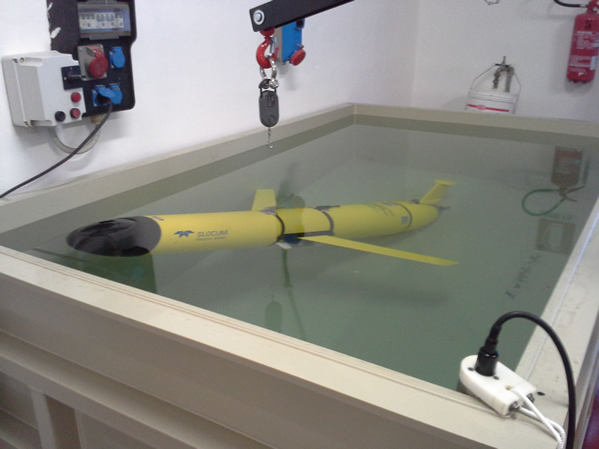
Slocum glider “TERESA”
Il glider “Teresa” è un veicolo autonomo sottomarino privo di propulsione, in grado di monitorare la colonna d’acqua fino a 1000 m di profondità lungo sezioni verticali mediante cicli di misura in discesa e risalita chiamati yo. I suoi spostamenti verticali e orizzontali avvengono esclusivamente grazie alla variazione del suo assetto tramite variazioni della densità (galleggiamento e sprofondamento) e spostamenti del centro di massa (inclinazione).
Equipaggiato con una sonda CTD, un sensore per la misura dell’ossigeno disciolto e un sensore di microstruttura, naviga attraverso la colonna d’acqua acquisendo dati riguardanti le proprietà fisico-chimiche e misurando la turbolenza. Il glider si muove senza eliche, la sua propulsione è la sola spinta di galleggiamento che viene resa alternatamente negativa (discesa) e positiva (risalita) durante gli yo. Per fare ciò il glider gonfia in misura opportuna una camera esterna che ne varia il volume a parità di massa. Al movimento, che sarebbe solo verticale, si aggiunge una componente orizzontale grazie all’inclinazione che il glider può assumere variando la posizione del suo centro di massa. Il glider dunque si sposta con uno zig-zag verticale come se fosse un aliante che plana lungo la colonna d’acqua. L’assenza di propulsione, e quindi di vibrazioni, permette una misura della turbolenza ad alta precisione, grazie ai sensori di shear e ai termistori ad alta frequenza.
Durante la missione, parte dei dati acquisiti possono essere trasmessi via satellite durante il periodo di emersione, necessario per il posizionamento e il controllo della navigazione del veicolo.
“Teresa”, come la maggior parte dei Glider, è modulare e consente una rapida riconfigurazione dei sensori, adattandosi alle diverse esigenze di ricerca o alle condizioni di emergenza.
Il GLIDER è stato acquisito dal CNR nel 2014 tramite fondi CNR-DCSPI nell’ambito del Progetto EUROFLEEETS (FP7-2009 / 2013, Coordinazione: IFREMER). Il CNR è stato partner rappresentato da ISMAR – UOS di Lerici (SP) con il coinvolgimento di ISAC – UOS di Roma.
Specifiche tecniche GLIDER “Teresa”
SLOCUM DEEP GLIDER G2
- Profondità Massima: 1000 m
- Sistema di Posizionamento Globale: GPS
- Satellite: Iridium and Argos
- Batterie: Alkaline and Lithium
- Digital Tail Fin: digi-fin
- Anno di acquisto: 2014
Sensori attualmente installati
- CTD: Seabird Electronic SGP (Slocum Glider Payload)
- Dissolved Oxygen Sensor: Optode mod.430 from Anderaa
- Microstructure Sensor: Microrider (MR) from Rockland Scientific
Specifiche Tecniche Sensore di Microstruttura
ROCKLAND SCIENTIFIC MICRORIDER
- Velocity shear – turbulence probes: SPM-38-1
- Fast response thermistors: FP07-38-1
- High resolution pressure sensor
- High resolution acceleration sensor
{kind=link}
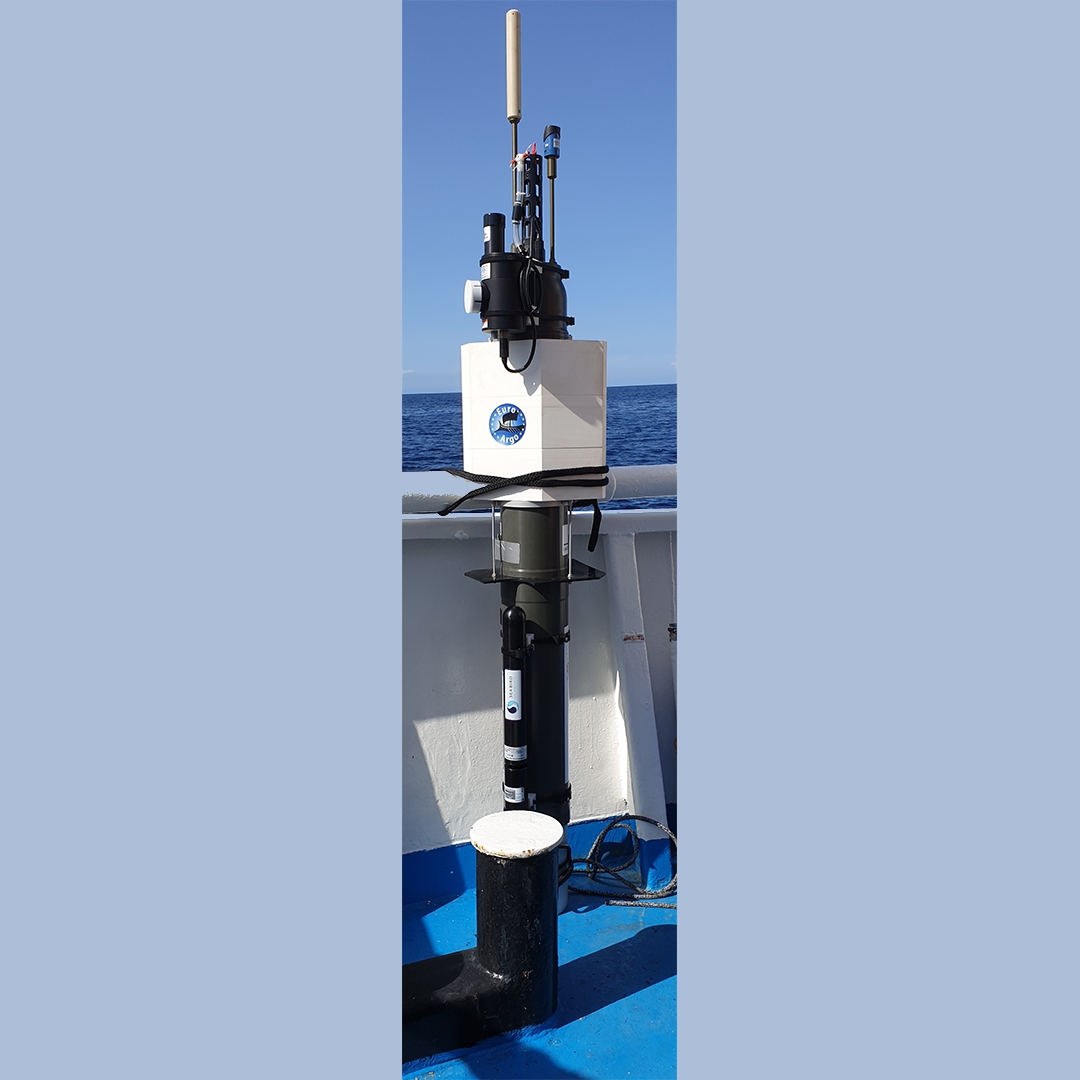
Biogeochemical-Argo
Le boe BGC–Argo sono robot profilanti autonomi che misurano le proprietà idrologiche e biogeochimiche degli oceani tra 0 e 2000 m, ogni 10 giorni. Le boe attualmente utilizzate in ISMAR acquisiscono profili di temperatura, salinità, ossigeno disciolto, clorofilla a, particolato in sospensione, sostanza organica disciolta colorata, irradianza solare discendente a 4 bande (380, 443, 490 e 555 nm), composizione comunità zooplanctoniche.
Le boe Biogeochemical (BGC) – Argo sono robot profilanti che autonomamente misurano le proprietà fisiche, chimiche, biologiche ed ottiche degli oceani per rispondere a domande scientifiche chiave per la salvaguardia della salute degli oceani, del clima e della biodiversità. Queste boe si muovono passivamente seguendo le correnti a 1000 m e sono programmate per acquisire un profilo tra 2000 m e la superficie almeno una volta ogni 10 giorni.
Tutte le boe hanno un GPS per conoscerne la posizione ed un’antenna Iridium per trasferire i dati acquisiti a terra via satellite. Una volta ricevuti i dati, questi sono soggetti ad un controllo qualità per la messa in rete, ad accesso aperto, in 24 ore dal campionamento. Le boe BGC-Argo sono equipaggiate con sensori miniaturizzati che acquisiscono misure di temperatura, salinità, pH, ossigeno disciolto, nitrati, clorofilla a, particolato in sospensione, sostanza organica disciolta colorata e irradianza solare a 4 bande nello spettro della radiazione visibile e ultravioletta.
Recenti sviluppi tecnologici consentono di equipaggiare le boe BGC-Argo con radiometri iperspettrali (> 100 bande) e sistemi video subacquei che permettono lo studio della diversità planctonica. Le attività ISMAR si inseriscono all’interno di un programma internazionale che mira ad avere 1000 boe BGC-Argo operanti in tutti gli oceani.
Citazione
Organelli, E., E. Leymarie, O. Zielinski, J. Uitz, F. D’Ortenzio, and H. Claustre. 2021.
Hyperspectral radiometry on Biogeochemical-Argo floats: A bright perspective for phytoplankton diversity. Pp. 90–91 in Frontiers in Ocean Observing: Documenting Ecosystems, Understanding Environmental Changes, Forecasting Hazards.
E.S. Kappel, S.K. Juniper, S. Seeyave, E. Smith, and M. Visbeck, eds, A Supplement to Oceanography 34(4).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
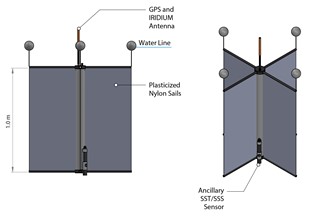
Drifters
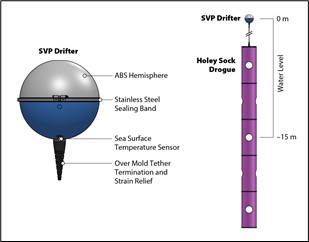
Le boe di deriva sono strumenti oceanografici disegnati per seguire le correnti marine dando informazioni sulla propria posizione e in alcuni casi su parametri ambientali quali temperatura e grandezze biogeochimiche. Sono anche chiamati strumenti “Lagrangiani”, dal nome del matematico Lagrange, perché misurano l’ambiente seguendo le particelle del fluido in movimento.
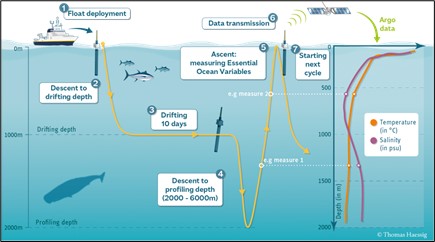
Esistono vari tipi di boe flottanti, che differiscono per il loro disegno e per la profondità a cui si muovono. Gli strumenti più comuni sono i cosiddetti “drifters” che seguono la corrente nello strato superficiale. A seconda della loro struttura e della zavorra usata possono seguire il flusso a 15 m, a 1 m o addirittura a pochi centimetri dalla superficie, a seconda delle applicazioni di interesse. Un altro tipo di boe flottanti sono i cosiddetti “floats” (https://argo.ucsd.edu/data/), progettati per immergersi ad una certa profondità nella colonna d’acqua, (tipicamente tra i 300 e i 500 m nel Mediterraneo), seguendo poi la corrente a quella profondità, ed emergendo ad intervalli temporali per comunicare i propri dati.
CNR – ISMAR ha un’esperienza molto vasta nel campo della strumentazione Lagrangiana e nell’analisi dei dati. Ha partecipato a numerosi progetti internazionali in cui clusters di drifters sono stati usati per studiare processi di dispersione con applicazioni ambientali, di inquinamento e di sicurezza, e per la validazione di strumenti di osservazione da remoto. CNR-ISMAR ha anche dato importanti contributi nello sviluppo di nuove metodologie per l’analisi di dati Lagrangiani e per lo sviluppo di sensori innovativo di tipo biologico.