
Mobile autonomous systems
{kind=link}
{kind=link}
OpenSWAP
OpenSWAP is a fully autonomous, remotely controlled surface vehicle built for custom applications, geophysical surveys, video inspections, and more. It is lightweight, inexpensive, fully customizable and compatible with most common GPS and sensors.
OpenSWAP features open source platforms (Arduino, Raspberry Pi) with autonomous dual GPS navigation system and integrated inertial sensors.
It is a small plastic catamaran (PELLD) with 4 brushless motors, modular and easy to put in the water. The versatility of the aluminum frame allows it to be easily interfaced with any instrument (such as side scan sonar, multi-parameter probes, sub-bottom profiler, multibeam echosounders), with commercial and non-commercial sensors, thus giving the possibility to expand the on-board equipment (it supports a load of more than 40 kg).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
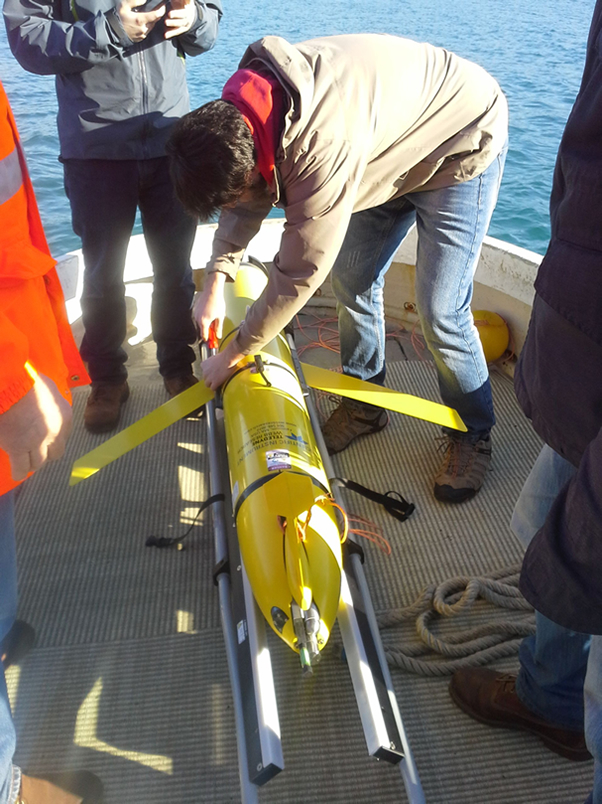
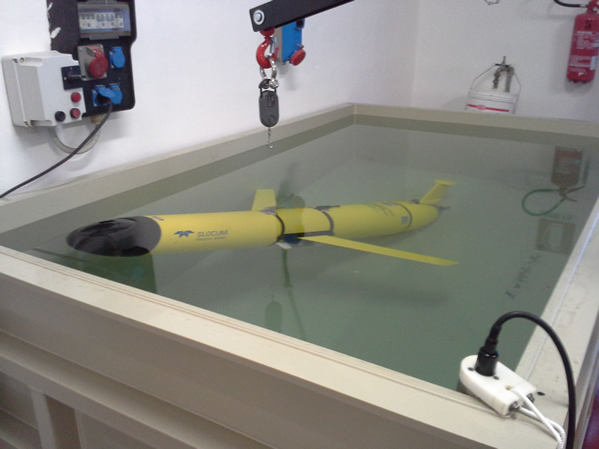
Slocum glider “TERESA”
The glider “Teresa” is an autonomous underwater vehicle without propulsion, capable of monitoring the water column up to 1,000 m depth along vertical sections by means of downward and upward measurement cycles called yo. Its vertical and horizontal displacements occur solely by changing its attitude through density changes (buoyancy and sinking) and center-of-mass shifts (tilting).
Equipped with a CTD probe, a dissolved oxygen sensor and a microstructure sensor, it navigates through the water column acquiring data regarding physicochemical properties and measuring turbulence. The glider moves without propellers; its propulsion is buoyancy alone, which is made alternately negative (descent) and positive (ascent) during yo. To do this, the glider inflates an external chamber to an appropriate extent, which varies its volume for the same mass. A horizontal component is added to the motion, which would be only vertical, by the tilt that the glider can assume by varying the position of its center of mass. The glider therefore moves with a vertical zig-zag as if it were a glider gliding along the water column. The absence of propulsion, and thus of vibration, allows high-precision measurement of turbulence, thanks to shear sensors and high-frequency thermistors.
During the mission, part of the acquired data can be transmitted via satellite during the emersion period, which is necessary for positioning and navigation control of the vehicle.
“Teresa,” like most Gliders, is modular and allows rapid reconfiguration of sensors, adapting to different search needs or emergency conditions.
The GLIDER was acquired by the CNR in 2014 through CNR-DCSPI funds under the EUROFLEEETS Project (FP7-2009 / 2013, Coordination: IFREMER). CNR was a partner represented by ISMAR – UOS of Lerici (SP) with the involvement of ISAC – UOS of Rome.
GLIDER “Teresa” technical specifications
SLOCUM DEEP GLIDER G2
- Maximum Depth: 1000 m
- Global Positioning System: GPS
- Satellite: Iridium and Argos
- Batteries: Alkaline and Lithium
- Digital Tail Fin: digi-fin
- Year of Purchase: 2014
Sensors currently installed
- CTD: Seabird Electronic SGP (Slocum Glider Payload)
- Dissolved Oxygen Sensor: Optode mod.430 from Anderaa
- Microstructure Sensor: Microrider (MR) from Rockland Scientific
Technical Specifications of Microstructure Sensor
ROCKLAND SCIENTIFIC MICRORIDER
- Velocity shear – turbulence probes: SPM-38-1
- Fast response thermistors: FP07-38-1
- High resolution pressure sensor
- High resolution acceleration sensor
{kind=link}
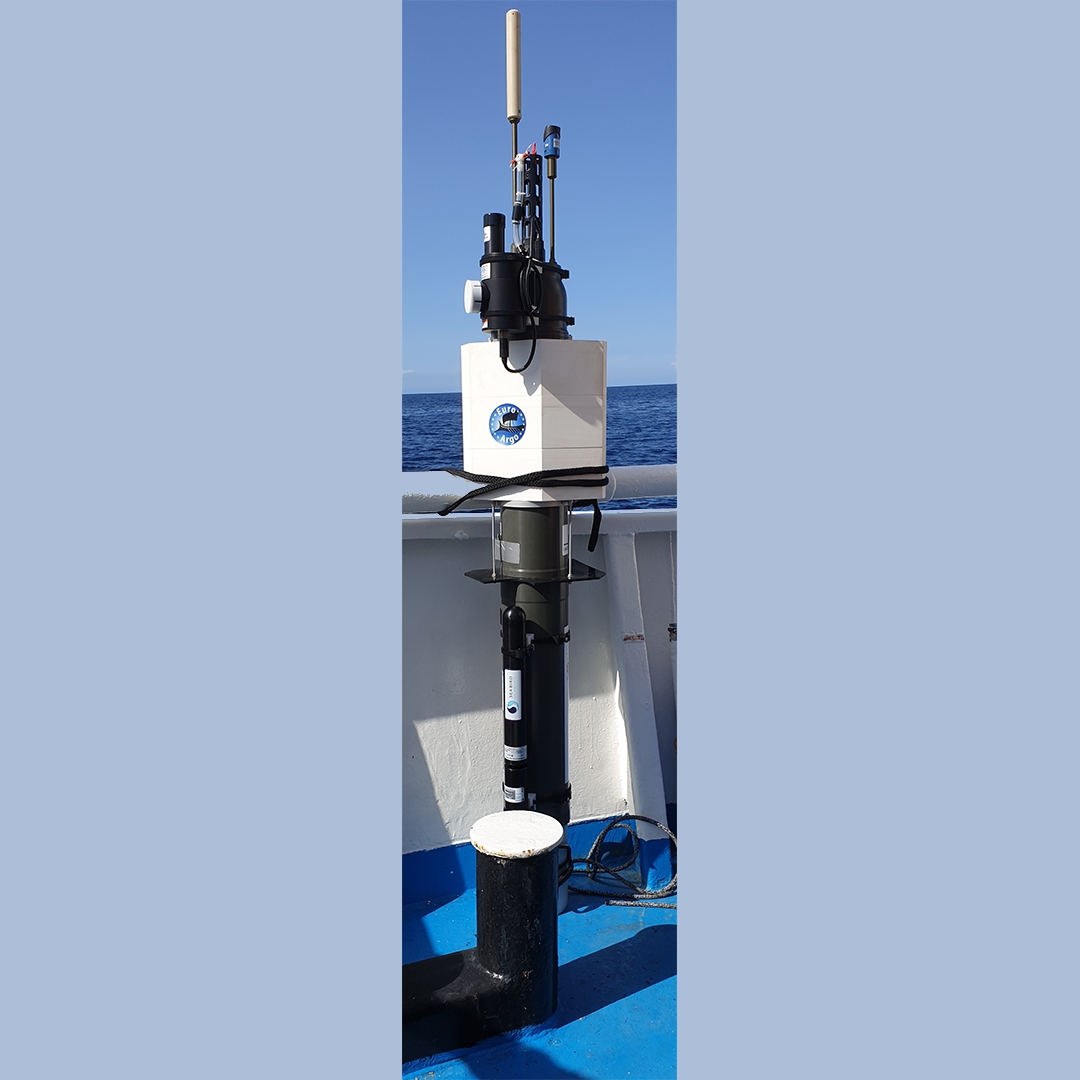
Biogeochemical-Argo
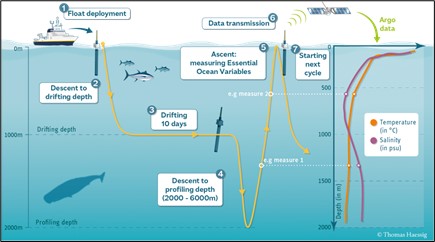
BGC-Argo floats are autonomous profiling robots that acquire 0-2000 m vertical profiles of hydrological and biogeochemical properties of the water, across all the oceans every 10 days. The floats currently employed by ISMAR are equipped with sensors to acquire temperature, salinity, dissolved oxygen, phytoplankton chlorophyll a, suspended particles, coloured dissolved organic matter, solar downwelling irradiance at 4 bands (380, 443, 490, 555 nm), and zooplankton abundance and composition.
Biogeochemical (BGC) – Argo floats are autonomous profiling robots that measure physical, chemical, biological and optical properties of the oceanic waters for studying Earth’s climate, marine biodiversity, and ocean health. These floats move following ocean currents at 1000 m depth and, every 10 days, they acquire one 0-2000 m profile.
When at the surface, BGC-Argo floats transfer GPS position and acquired data to land via satellite communication provided by an Iridium antenna. Data are then quality controlled and openly distributed in less than 24 hours. BGC-Argo floats are equipped with miniaturized sensors that acquire temperature, salinity, dissolved oxygen, pH, nitrates, phytoplankton chlorophyll a, suspended particles, coloured dissolved organic matter, solar downwelling irradiance at 4 bands in the UV and visible spectrum of light.
New sensors upgrade targets to equip BGC-Argo floats with hyper-spectral radiometers (> 100 bands) and underwater cameras to study plankton diversity. ISMAR activities are carried out in the framework of the International BGC-Argo programme that aims to build a global network of 1000 floats around the world.
Citation
Organelli, E., E. Leymarie, O. Zielinski, J. Uitz, F. D’Ortenzio, and H. Claustre. 2021.
Hyperspectral radiometry on Biogeochemical-Argo floats: A bright perspective for phytoplankton diversity. Pp. 90–91 in Frontiers in Ocean Observing: Documenting Ecosystems, Understanding Environmental Changes, Forecasting Hazards.
E.S. Kappel, S.K. Juniper, S. Seeyave, E. Smith, and M. Visbeck, eds, A Supplement to Oceanography 34(4).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
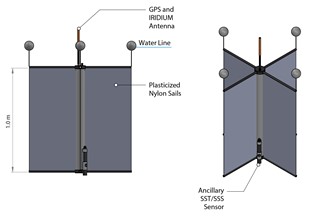
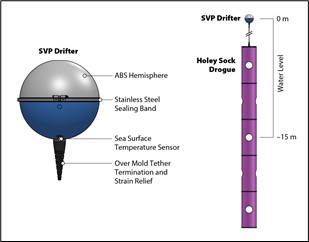
Drifters
Drift buoys are oceanographic instruments designed to follow sea currents by giving information on their position and in some cases on environmental parameters such as temperature and biogeochemical quantities. They are also called “Lagrangian” instruments, named after the mathematician Lagrange, because they measure the environment by following moving fluid particles.
There are various types of floating buoys, which differ in their design and the depth at which they move. The most common instruments are so-called drifters, which follow the current in the surface layer. Depending on their design and the ballast used, they can follow the flow 15 m, 1 m or even a few centimeters from the surface, depending on the applications of interest. Another type of floating buoys are the so-called “floats”, designed to dive to a certain depth in the water column, (typically between 300 and 500 m in the Mediterranean), then following the current at that depth, and emerging at time intervals to communicate their data.
CNR – ISMAR has extensive experience in Lagrangian instrumentation and data analysis. It has participated in numerous international projects in which clusters of drifters have been used to study dispersion processes with environmental, pollution and safety applications, and for the validation of remote observation instruments. CNR-ISMAR has also made important contributions in the development of new methodologies for Lagrangian data analysis and the development of innovative biological sensors.