
{kind=link}
{kind=link}
Variational data assimilation system
For a number of applications, ranging from algorithmic developments to climate reconstructions and assessment of novel observation types, ISMAR develops a variational data assimilation scheme, which features hybrid-covariance schemes and simplified four-dimensional data assimilation.
Data assimilation optimally combines in-situ and remotely sensed observations with a prior numerical forecast, to produce an accurate analysis of the ocean state for subsequent forecasts or climate reconstructions. ISMAR develops a state-of-the-art gridpoint-based variational data assimilation system, originally called OceanVar.
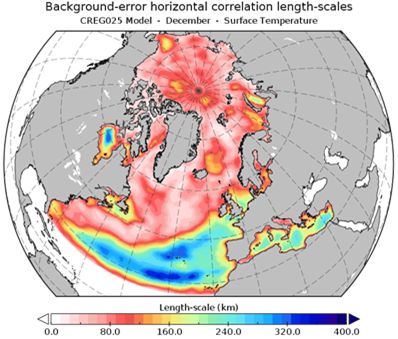
The system models horizontal and vertical covariances through the use, respectively, of efficient recursive filters and multi-variate empirical orthogonal functions, respectively.
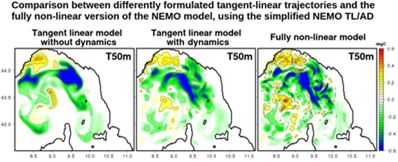
OceanVar also embeds the support for hybrid ensemble-variational background-error covariances, strong- and weak- constrained four-dimensional data assimilation through the use of simplified tangent-linear and adjoint versions of the NEMO ocean model, and features several options for controlling multi-variate balances, non-linear observation quality-control, and model-error representation. The data assimilation system is used in reconstructions of the ocean climate of the past, coupled data assimilation experiments, and to test novel algorithms for ingesting present and future satellite data.
{kind=link}
{kind=link}
Sequential data assimilation system
For applications ranging from forecasting to climatological reconstruction of marine variables with the use of a finite element hydrodynamic model, ISMAR has developed a sequential data assimilation system based on the Kalman filter and the generation of perturbations of the forcings, boundary conditions and the model physical states.
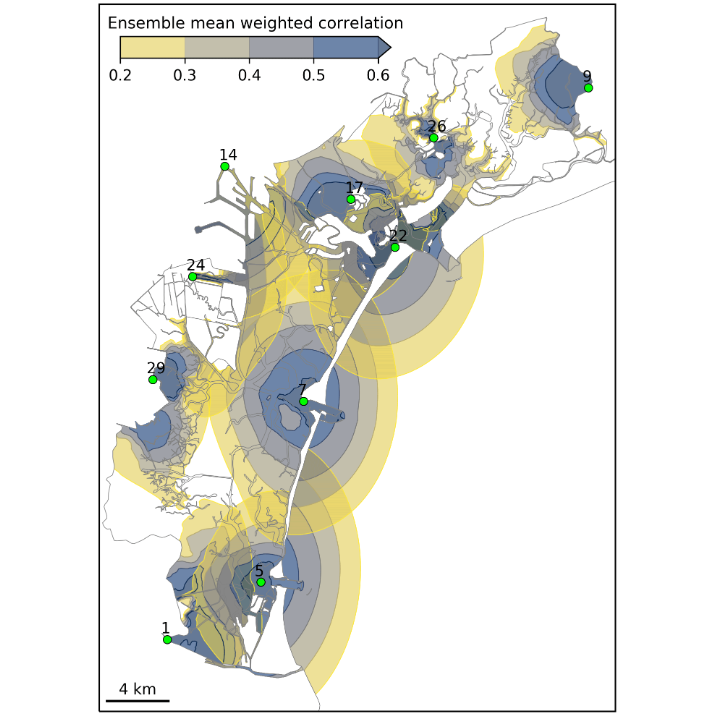
ISMAR develops a data assimilation system based on Ensemble Kalman Filter techniques. The system creates an ensemble of model hydrodynamic states from which to calculate the variances and covariances between the dynamic variables and accurately specify the background-error covariance matrix, which can evolve over time. The assimilation with the Kalman filter is performed sequentially, assimilating the observations at the time of their recording. For the generation of the ensemble, routines capable of generating pseudo-Gaussian spatial perturbations are used. They can be used for both the initial state and the forcing and boundary conditions. Depending on the physical system to be modeled, it is possible to prescribe a different number of ensemble members and use or not localization techniques, with an appropriate localization scale.
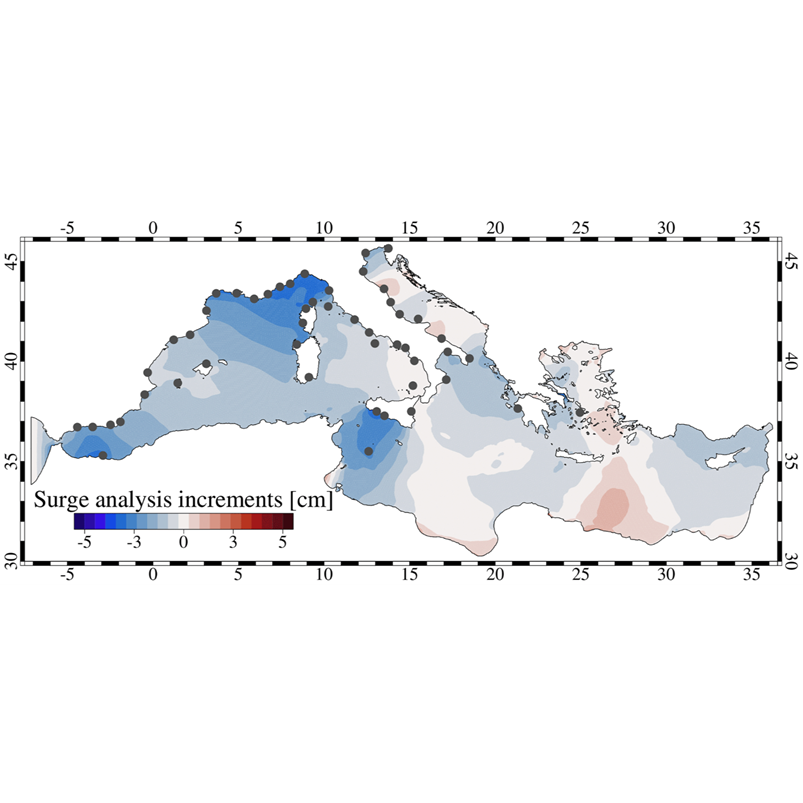
The ensemble data assimilation system is used with the SHYFEM finite element hydrodynamic model, also developed at ISMAR. Reanalysis and forecast studies have been carried out, mainly focusing on sea level reproduction.
References: (Bajo et al., 2019, 2023), Ferrarin et al. (2021)
Bajo, M., Ferrarin, C., Umgiesser, G., Bonometto, A., & Coraci, E. (2023). Modelling the barotropic sea level in the Mediterranean Sea using data assimilation. Ocean Science, 19(3), 559–579. https://doi.org/10.5194/os-19-559-2023
Bajo, M., Međugorac, I., Umgiesser, G., & Orlić, M. (2019). Storm surge and seiche modelling in the Adriatic Sea and the impact of data assimilation. Quarterly Journal of the Royal Meteorological Society, 145(722), 2070–2084. https://doi.org/10.1002/qj.3544
Ferrarin, C., Bajo, M., and Umgiesser, G.: Model-driven optimization of coastal sea observatories through data assimilation in a finite element hydrodynamic model (SHYFEM v. 7_5_65), Geosci. Model Dev., 14, 645–659, https://doi.org/10.5194/gmd-14-645-2021, 2021.
{kind=link}
LAVA (LAgrangian Variational Analysis)
LAVA is an open-source software for combining different types of oceanographic data (“data fusion or data blending”) that is extremely useful for managing emergencies at sea, such as oil spills and search and rescue operations.
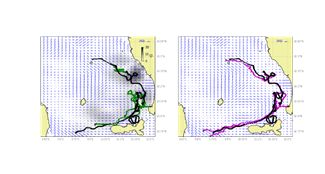
LAVA was developed by CNR-ISMAR together with the Universities of Toulon and Miami. LAVA provides an optimal blending of information on the speed and direction of ocean currents from different types of oceanographic instruments. The approach is Lagrangian and variational, requiring the minimisation of the distance between observed Lagrangian positions and those obtained by numerically integrating an Eulerian field. Figure shows a specific example of applying LAVA software to velocities measured by coastal radars.
Integrating the original radar velocity data yields trajectories (in green in the left panel) that diverge from those observed by the drifters (in black).
By considering other drifters in the area and applying LAVA, the velocities are corrected locally and this allows the new trajectories (in purple on the right pane;) to be closer to those observed by the drifters. The improvement is important from a practical and operational point of view: the more precise trajectory estimates obtained with LAVA considerably reduce the uncertainty in the radius of operation for both search and rescue and oil spills applications.